
In laboratories around the world robots are used to automatically feed samples to analysers of all kinds. I personally work at a university where only in our department we have dozens of these robots which are generally called autosamplers.
Most of these autosamplers are very closed source and often it is impossible to use them in the most efficient way. Most of these autosamplers are just simple xyz robots and don't require very high positional accuracy.
The OpenSampler robot shown here can be used for the analysis of gas samples (in glass bottles or vials with a rubber septum on top), or for the analysis of liquids (in vials).
OpenSampler uses RepRap Ramps electronics and firmware. All control is with g-code commands as in most 3d-printers. The location of the vial to be sampled is send by serial commands, solenoid valves are attached to the mosfet outputs on the Ramps board to control flow of sample.
I am extremely happy with the performance of the OpenSampler, and hope somebody can use some of the basics of this idea to create an even better one!
All design files will be put on github: https://github.com/north90/OpenSampler
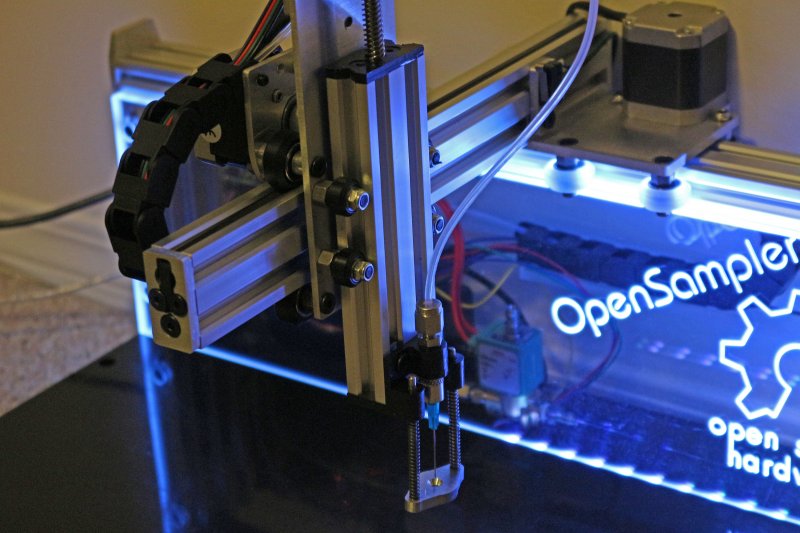
The first prototype OpenSampler in action with an isotopic gas analyzer.

The second prototype OpenSampler

OpenSampler: OpenSource autosampler for use in laboratory
Build in 'OTHER BUILDS/PROJECTS' published by north90, Nov 13, 2014.
An open source autosampler to be used in laboratories for the automated analysis of gas or liquid samples.
-
-
Build Author north90, Find all builds by north90
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution NonCommercial - Share Alike - CC BY NC SA
Reason for this Build
Create a flexible, open source autosampler to reduce costs and improve possibilities for scientific research -
Attached Files: